
Rohevõrgustiku planeerimine Viva Grass Planner’i abil
Rohevõrgustiku lugu
Rohumaadel on Eesti rohevõrgustikus võtmeroll ja nende säilitamine ja kaitse panustab rohevõrgustiku eesmärkide saavutamisse, nagu ütleb üleriigiline planeering Eesti 2030+. Vähemintensiivselt majandatavaid rohumaid, nagu püsirohumaad ja poollooduslikud niidud, iseloomustab kõrge reguleerivate ja toetavate ökosüsteemiteenuste (ÖST) pakkumine, sh nt tolmeldamine, elupaikade pakkumine võtmeliikidele ja globaalne kliimaregulatsioon süsiniku sidumise kaudu taimestikus ja mullas (vt tabel 2). Paljude ökosüsteemiteenuste pakkumine ehk multifunktsionaalsus on põhjus, miks rohumaad on Eesti rohevõrgustiku oluline osa.
Viva Grass Planneri prioriseerimise tööriista rohevõrgustiku rakendus võimaldab planeerijatel ja muudel huvirühmadel saada teavet rohumaade olulisuse kohta Eesti rohevõrgustikus. Rohevõrgustiku rakenduse peamised eesmärgid on:
1. Aidata planeerijatel integreerida maakonna rohevõrgustikku valla üldplaneeringusse
2. Rõhutada rohumaade tähtsust rohevõrgustikus (ÖST pakkumine, looduskaitseline seisund)
3. Avastada võimalikke maakasutuse konflikte rohevõrgustiku rakendamisel
Saaremaa valla näites pakub Viva Grass töövahendi rohevõrgustiku rakendus mitu varianti Saare maakonna rohevõrgustiku (RV) integreerimiseks Saaremaa valla üldplaneeringusse. Allpool on kirjeldatud töö käik ja analüüsi tulemused.
Viva Grass Planneri roll
Seotud huvirühmad:
- Planeerijad
Antud näite jaoks olulised Viva Grass Planneri funktsioonid:
- Organisatsiooni konto (account). Iga organisatsioon saab oma osa pilvepõhisest süsteemist. Seda osa saab organisatsiooni administraator/kasutaja hallata ja kohandada vastavalt oma vajadustele. Organisatsioon saab hallata erinevaid territooriume, nt riik, vald, kaitseala või talu. Organisatsiooni andmed ei ole nähtavad ega kättesaadavad teistele Planneri kasutajatele.
- Viva Grass aluskaardi (basemap) andmed ja kontekstuaalsed andmekihid. LIFE Viva Grass projekti jooksul töötati välja mitmeid metoodikaid ja andmestikke. Osa andmestruktuure ja ettevalmistatud andmeid saab organisatsioon kasutada, et kiirendada oma Viva Grass Plnneri konto ettevalmistamist, et saaks kiiremini alustada andmete hindamise või muu ruumiandmetele põhineva otsustusprotsessiga. Viva Grass kontekstuaalsed andmekihid annavad organisatsioonile vajaliku ruumilise konteksti, ilma et peaks ise vastavate andmete otsimise ja ettevalmistamisega vaeva nägema.
- Organisatsiooni kontekstandmekihid. See on rida määratletud ja konfigureeritud kontekstandmekihte. Iga organisatsioon saab kasutada seda struktuuri, et üles laadida või sisestada oma kontekstandmeid ja kasutada neid kalkulatsioonideks (intersection), kontekstandmete salvestamiseks ja haldamiseks. Saadaval on enam kui 10 temaatilist kihti ja nende struktuurid. Lisaks on kolm kohandatavat kontekstandmekihti punkt-, joon- ja polügoonandmete jaoks. Neid kohandatavaid kihte saab kasutada erinevat tüüpi kontekstandmete üleslaadimiseks ja kasutamiseks.
- Kohandatavad atribuudid (Custom attributes). Et rahuldada organisatsioonide erinevaid vajadusi, on võimalik lisada kohandatavaid atribuute maakasutuspolügoonidele. Atribuutide formaat võib olla text, double või integer. Atribuute saab kasutada maakasutusüksuste ajutise või püsiva informatsiooni salvestamiseks, kalkulatsiooni või prioriseerimise tulemuste salvestamiseks jne.
- Töövahendi võimalused:
- Visuaalne analüüs/hindamine. Viva Grass Planner pakub terve rea kaardifunktsioone: aluskaardi valik, oma andmete üleslaadimise võimalus, sisse- ja väljasuumimine, asukohaotsing, kaardikihtide haldamine, sh võimalus muuta kihi läbipaistvust jne. Kõik see võimaldab kaardiandmeid visuaalselt hinnata ja teha ruumiandmete põhiseid otsuseid.
- Kalkulatsioon (Calculation). See on Viva Grass Planneri üks võimalusterohkemaid tööriistu. See lihtsalt kasutatav tööriist võimaldab maakasutusüksuste andmete ülekatet (intersect) valitud kontekstandmekihiga ja tulemuste salvestamist maakasutusüksuste atribuutinfona. Antud näites kasutatakse ülekatet (intersection) maakasutusüksuste valikuks, mis kuuluvad erinevatesse rohevõrgustiku stsenaariumidesse või mis langevad kokku üldplaneeringu arendusaladega jne.
- Klassifikatsioon (Classification). See tööriist võimaldab klassifitseerida maakasutusüksusi erinevatesse kategooriatesse maakasutusüksuste atribuutinfoga seotud klassifitseerimisreeglite alusel. Antud näites kasutatakse seda rohumaaüksuste klassifitseerimiseks erinevatesse rohevõrgustiku stsenaariumidesse.
- Üles- ja allalaadimine (Upload/Download). See on töövahendi väga tähtis funktsioon, mis võimaldab igal hetkel andmeid alla laadida, muuta neid muu tarkvara (nt ArcGIS Desktop) abil ja laadida tagasi üles Viva Grass Planner moodulisse.
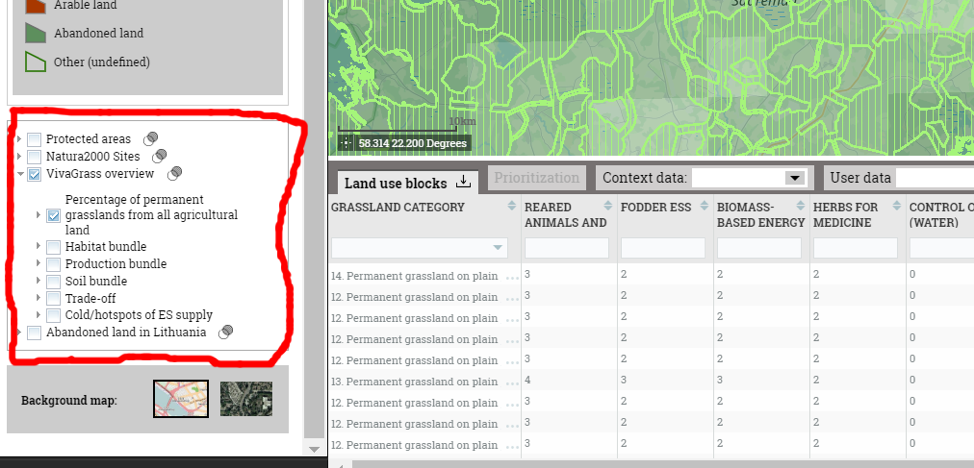
Kontekstandmekihtide lisamine
Viva Grass Planner >> More >> Settings >> Layers settings
Lülitage allpool märgitud kihid sisse, tehes linnukese vastavasse kasti.

Kontekstandmekihtide loetelu:
- Rohevõrgustiku polügoonid (Green network (polygons)) – Rohevõrgustiku alternatiivid tuleks üles laadida sellesse kihti koos alternatiivi identifikaatoriga (atribuutväärtusena).
- Kohandatud polügoonkiht (Custom Polygon Layer (polygons)) – Üldplaneeringu polügoonid
Muid kontekstandmekihte saab vajadusel sisse või välja lülitada.
Oluline! Muudatuste nägemiseks tuleb töövahend uuesti laadida ja uuesti sisse logida.
Kohandatud atribuutide lisamine
Viva Grass Planner >> More >> Settings >> User attributes
Saate lisada maakasutusüksustele täiendavaid, kohandatud atribuute. Neid atribuute saab kasutada maakasutusüksuste kohta täiendavate andmete, kalkulatsiooni, ülekatte, klassifitseerimise või prioriseerimise tulemuste jms salvestamiseks.

| ua4 | SNinGN | Double |
| ua5 | SNinGN2 | Double |
| ua6 | HabBund | Double |
| ua7 | SoilBund | Double |
| ua8 | ProdBund | Double |
| ua9 | ProtSpec | Double |
| ua10 | IsInConfl | Double |
Antud näites vajame:
- SNinGN – kohandatud atribuut kalkuleerimise tulemuse salvestamiseks. RV esimese alternatiivi rohumaad.
- SNinGN2 – kohandatud atribuut kalkuleerimise tulemuse salvestamiseks. RV teise alternatiivi rohumaad.
- HabBund – elupaikade ÖST rühma kuuluvad rohumaad.
- SoilBund – mulla ÖST rühma kuuluvad rohumaad.
- ProdBund – produktsiooni ÖST rühma kuuluvad rohumaad.
- ProtSpec – rohumaad, kus leidub kaitstavaid liike.
- IsInConfl – kohandatud atribuut kattuvuse kalkulatsiooni tulemuse salvestamiseks. Kattuvuse kalkulatsiooni peamine eesmärk on avastada väljaoakutud RV stsenaariumides alad, mis kattuvad määratud planeeringualadega (üldplaneeringus).
Vajadusel saab lisada ka muid atribuute.
Oluline! Muudatuste nägemiseks tuleb töövahend uuesti laadida ja uuesti sisse logida.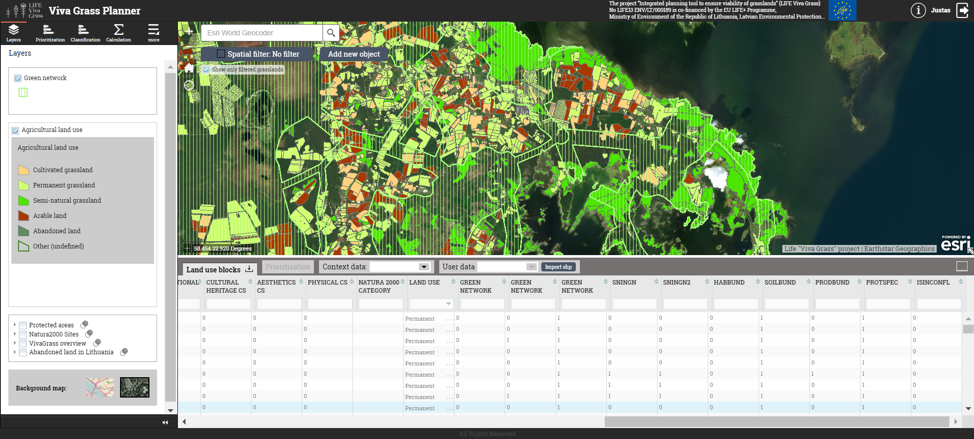
Täiendavate atribuutide arvutamine
Viva Grass >> Calculation
Atribuutide arvutamist saab teha ArcGIS Desktopis või Planneris. See tööriist võimaldab kahe kihi (maakasutusüksused ja valitud organisatsiooni kontekstandmekiht) ülekatet (intersection), ülekatet määratud puhvertsooniga (maakasutusüksuse ümber), leida organisatsiooni kontekstandmekihi polügoonide sisse jäävaid maakasutusüksusi ning kui palju organisatsiooni kontekstandmekihi elemente maakasutusüksus sisaldab.
- Rohevõrgustikku kuuluvad maakasutusüksused (“GN_1”)
Selles etapis tuvastame kaardikihtide ülekatte abil maaüksused, mis kuuluvad rohevõrgustikku (organisatsiooni kontekstandmekiht “Custom polygons layer”) green network polygon (Attribute “Type” = “GN_1”) (samas kihis on ka alternatiivse rohevõrgustiku polügoon). Tulemuseks saame rohevõrgustikku kuuluvate maakasutusüksuste (rohumaade) nimekirja.

Kalkulatsiooni tulemusi saab kontrollida atribuuttabeli andmete filtreerimisega (SNINGN > 0):

- Alternatiivsesse rohevõrgustikku kuuluvad maakasutusüksused (“GN_2”)
Selles etapis tuvastame maakasutusüksused, mis kuuluvad alternatiivsesse rohevõrgustikku (organisatsiooni kontekstandmekiht “Custom polygons layer”). Alternatiivse rohevõrgustiku polügoon on salvestatud samas kihis eraldi polügoonina (Attribute “Type” = “GN_2”).

Ülekatte (intersection) tulemuseks saame alternatiivsesse rohevõrgustikku kuuluvate maakasutusüksuste nimekirja.
- Maakasutusüksused, kus leidub kaitstavaid liike
Rohevõrgustikuga seotud atribuudid arvutatakse ja salvestatakse Viva Grass Planneri andmebaasi struktuuri. Nüüd saab neid väärtusi kasutada klassifitseerimiseks, prioriseerimiseks ja visuaalseks analüüsiks koos teiste maakasutusüksuste atribuutidega, nagu näiteks maakasutuse tüüp, rohumaa kategooria, mulla boniteet, reljeefitüüp, ökosüsteemiteenuste väärtused, ÖST rühmad ja kompromissid jne.
Rohevõrgustiku hindamine
Oluline samm rohevõrgustiku planeerimisel on kriitiliste alade tuvastamine, kus väärtuslikud elupaigad ei ole rohevõrgustiku ega ka ühegi kaitseala koosseisus. neid väärtuslikke rohumaid ähvardab seisundi halvenemise ja sellest tulenevalt ökosüsteemiteenuste kadumise oht, mistõttu need alad tuleks eelisjärjekorras rohevõrgustikuga liita. Rohevõrgustiku hindamine võimaldab tuvastada ja kuvada sellised prioriteetsed alad kaardil.
Tööetapid:
- Rohevõrgustiku visuaalne analüüs. Kuna meil on kaks alternatiivset polügooni samas rohevõrgustiku kontekstandmekihis, peame filtreerima, et jääks ainult üks rohevõrgustik (Context data layer >> Attribute filter >> Type = GN_1)

- Kuna oleme huvitatud väärtuslikest (poollooduslikest) rohumaadest, mis on maakonna rohevõrgustikust välja jäänud, peame esmalt filtreerima kõik rohumaad ja jätma alles ainult poollooduslikud. Land use blocks >> Attribute filter (“Land use” = Semi-natural grasslands)


- Edasi leiame rohevõrgustikust väljas olevad väärtuslikud rohumaad. Land use blocks >> Attribute filter (“Land use” = Semi-natural grasslands AND “SNINGN” = 0 (maakasutusüksused, mis ei ole rohevõrgustikus))

- Rohevõrgustikust välja jäänud rohumaade looduskaitseline seisund
- Maakonna rohevõrgustikust välja jäänud kaitstavate liikide elupaigad
Stsenaariumide koostamine (Klassifikatsioon)
Stsenaariumid:
- Stsenaarium 1: Miinimumstsenaarium (Bare minimum) (hõlmab üksnes elupaikade ÖST rühma kuuluvaid rohumaid)
- Stsenaarium 2: Keskmine ökoloogiline sidusus (Medium ecological coherence) (hõlmab elupaikade ÖST rühma kuuluvaid rohumaid ja rohumaid, kus leidub kaitsealuseid liike)
- Stsenaarium 3: Kõrge ökoloogiline sidusus (High ecological coherence) (hõlmab elupaikade ja mulla ÖST rühmadesse kuuluvaid rohumaid ning rohumaid, kus leidub kaitsealuseid liike. See stsenaarium on parim võimalik variant, mis võimaldab saavutada paljude erinevate ökosüsteemiteenuste kõrgeima pakkumise.
Toetamaks planeerijaid maakonna rohevõrgustiku integreerimisel valdade üldplaneeringutesse, loob Viva Grass Planneri rohevõrgustiku planeerimise rakendus kolm stsenaariumi järjest kasvava rohumaade osakaaluga rohevõrgustikus. Poollooduslike rohumaade valla rohevõrgustikuga liitmise kriteeriumid põhinevad nende võimel potentsiaalselt pakkuda teatud ökosüsteemiteenuseid. See võime saavutab kõrge multifunktsionaalsuse taseme, kui rohumaa kuulub ÖST sünergiasse (ÖST rühma) (vt teooria ptk 1.2.2). ÖST sünergiasse (ÖST rühma) kuuluvatel rohumaadel tähendab ühe teenuse pakkumise kasv ka teiste samasse rühma kuuluvate teenuste kasvu. Mis puutub rohumaade rolli rohevõrgustikus, siis elupaikade ja mulla ÖST rühmad pakuvad terve rea keskkonnahüvesid. Need hüved (mullakaitse, tolmeldamine jne) ei piirdu üksnes konkreetse rohumaaga, vaid neil on laiem ruumiline mõju (nt tolmeldamise kasv toob kasu ka ümbritsevale põllumajandusmaale). Elupaikade ja mulla ökosüsteemiteenuste rühma kuuluvate rohumaade liitmisel rohevõrgustikuga kindlustame reguleerivate ja tugiteenuste säilimise, mis on vajalik rohevõrgustiku sidususe ja toimivuse tagamiseks.
Tööetapid:
- Avage klassifikatsiooni tööriist (Viva Grass Planner >> classification)

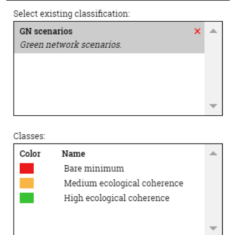
- Võimalus luua uus klassifitseerimisreegel (create new Classification rule) (või valida ja avada (“Open”) olemasolev reegel “GN scenarios”)
- Opening classification

- Klasside muutmine või loomine
- Avaldise (expression) koostamine
- Avaldise testimine (“Test“)

- Klassifitseerimise tulemus ilmub kaardikihtide loendisse

- Klassifikatsioonireeglid (salvestatud klassifitseerimisreeglis “GN scenarios”):
Klassi nimi Avaldis Kommentaarid Bare minimum ua6 = 1 AND ua9 = 0 AND ua7 = 0 Medium ecological coherence ua6 = 1 AND ua9 = 1 AND ua7 = 0 High ecological coherence ua6 = 1 AND ua9 = 1 AND ua7 = 1 Klassifitseerimisreeglid eraldi stsenaariumidele:

- Miinimumstsenaarium (Klassifitseerimisreegel “Bare minimum”)
Klassi nimi Avaldis Kommentaarid Bare minimum ua6 = 1 AND ua9 = 0 AND ua7 = 0 - Keskmine ökoloogiline sidusus (Medium ecological coherence)
Klassi nimi Avaldis Kommentaarid Medium ecological coherence ua6 = 1 AND ua9 = 1 AND ua7 = 0 - Kõrge ökoloogiline sidusus (High ecological coherence)
Klassi nimi Avaldis Kommentaarid High ecological coherence ua6 = 1 AND ua9 = 1 AND ua7 = 1 Rohevõrgustiku kavandamine
Rohumaad, mis tuleks hõlmata üldplaneeringu rohevõrgustikku vastavalt kolmele stsenaariumile
Tööetapid:
- Filtreerige ainult rohevõrgustikust väljas olevad rohumaad (Attribute filter >> SNINGN = 0)
- Avage klassifikatsiooni tööriist (Viva Grass Planner >> Classification)
- Määrake ruumifiltri abil klassifikatsiooni territoorium (katsetamise eesmärgil on soovitav valida väiksem ala, et kalkulatsioonid toimuksid kiiremini)
- Valige üks stsenaarium salvestatud klassifitseerimisreeglitest ja vajutage “Open“.
- Tulemused kuvatakse kaardil.
Vajadusel saab klassifitseerimisreeglit muuta: saate muuta avaldist, kaardil visualiseerimise värvi, lisada uusi avaldise elemente jne.
Et saada kõik kolm stsenaariumi, tuleb neid samme korrata, valides iga kord erineva klassifitseerimisreegli.
Tulemused:
- Miinimumstsenaarium.

- Keskmine ökoloogiline sidusus.

- Kõrge ökoloogiline sidusus.

Rohevõrgustiku hindamine (RV alternatiivid)
Tööetapid:
Suumige kaardil sisse, et RV alternatiive paremini näha (paremaks visualiseerimiseks kasutage satelliit-aluskaarti)

- Kaks RV alternatiivi on salvestatud samasse kontekstandmekihti “Green network” kahe erinevate atribuutväärtustega polügoonina.
- Et näha üht või teist polügooni, peate avama kontektandmekihi atribuutide loendi

- Ja filtreerima polügooni, mida soovite kaardil näha

- Et näha üht või teist polügooni, peate avama kontektandmekihi atribuutide loendi
- Kuna kasutasime neid RV polügoone väärtuste arvutamiseks (vt Kohandatud atribuutide arvutamine), on meil juba tuvastatud, millised maaüksused/rohumaad on rohevõrgustiku teises alternatiivis. Atribuudifiltri abil saame valida rohumaad, mis ei kuulu RV teise alternatiivi (GN2) (Land use blocks >> Attribute filter >> SNINGN2 = 0)
Antud juhul tuleks kõik eelkirjeldatud sammud rakendada rohumaadele, mis ei kuulu rohevõrgustiku teise alternatiivi (GN2), ning seejärel tulemusi võrrelda.
RV ettepaneku ja KOV üldplaneeringu vaheliste konfliktide analüüs
Kuigi RV on olemuselt multifunktsionaalne, on selle kavandamise faasis vajalik huvide konfliktide tuvastamine. Kattuvused võivad esineda väljapakutud RV stsenaariumide ja juba määratud kasutusega planeeringualade vahel (nt tööstus- või elamuala). Rohevõrgustiku rakendus võimaldab avastada RV stsenaariumide ja üldplaneeringute vahelisi vms võimalikke konflikte.
Demograafiline prognoos
Tööetapid:
- Lülitage sisse “Demographic prognosis” kiht Viva Grass kontekstandmekihtide loendis
- Saate teha demograafilise prognoosi ja rohevõrgustiku visuaalse analüüsi.






